UL Lafayette · MCHE 201 · 2023
Autonomous platform that completed a five-task course using onboard sensors and a modular Python control stack. I led mechanical design, integration, and tuning. The system used two DC steppers for drive, a telescoping linear actuator and a solenoid hook to retrieve targets, and IR + magnetic sensing for task detection.
Python
PID
Stepper Motors
Linear Actuator
Solenoid
IR / Magnetic Sensors
Shielding
🏆 1st place in judged design for mechanical & controls execution. Live trials placed 10th due to an early sensor trigger that caused a collision; subsequent shielding and software delay logic eliminated false triggers.

Core Engineering Metrics
| Control Language | Python – 6 modular scripts |
|---|---|
| Platform | Arduino-compatible MCHE201 board |
| Actuation | 2 × drive motors, 1 × telescoping linear actuator, 1 × solenoid hook |
| PID Overshoot | ≥ 70% reduction after tuning |
| Constraints | 18" H × 12" W × 24" L (deployed) |
| Sensor Suite | IR proximity + magnetic detection, debounced & shielded |
| Reach | 12 in spinner center zone |
| Power | Logic isolated from high-current actuation |
| Competition window | 30 s per attempt |
|---|---|
| Setup | 4 minutes |
| Cleanup | 2.5 minutes |
| Target pickup | 3/4 attempts successful in testing |
| False triggers | 0% after shielding + delays |
Software Stack (modular)
- main.py — system integration and run sequence.
- navigation.py — path and turning logic.
- pid_control.py — tuned stepper motor loop.
- sensor_readings.py — IR/magnetic filtering and timing guards.
- actuation.py — actuator / solenoid control.
- state_manager.py — event sequencing and fail-safes.
Multiple iterations are archived in Code. Later files supersede earlier drafts and final versions are marked.
Competition Performance
| Design Score (judges) | 1st place – best mechanical & controls execution |
|---|---|
| Live Trial Score | 10th – early trigger caused collision in Round 1; improved thereafter |
| Control Execution | Fully autonomous, start-to-finish |
Demo Videos
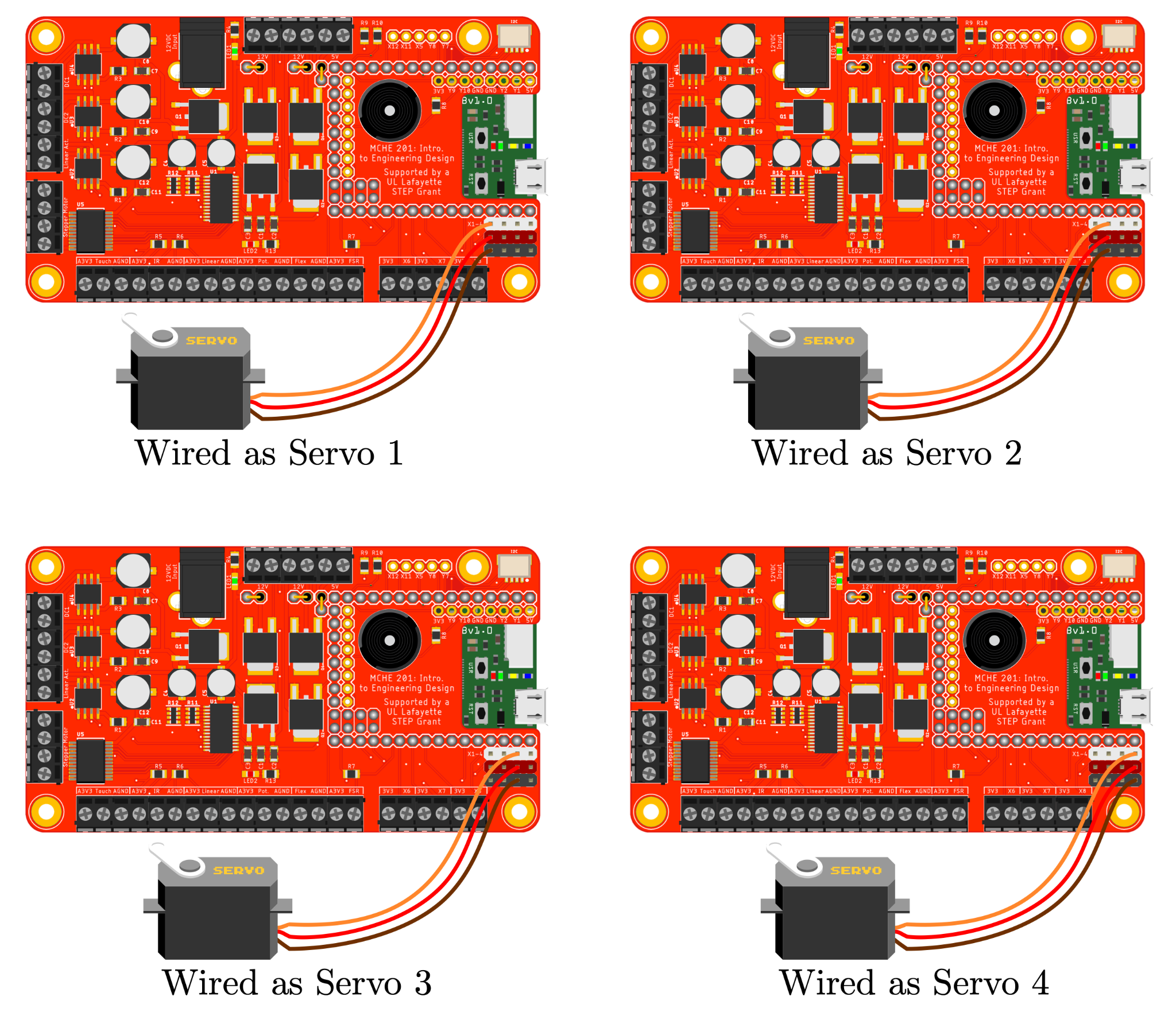
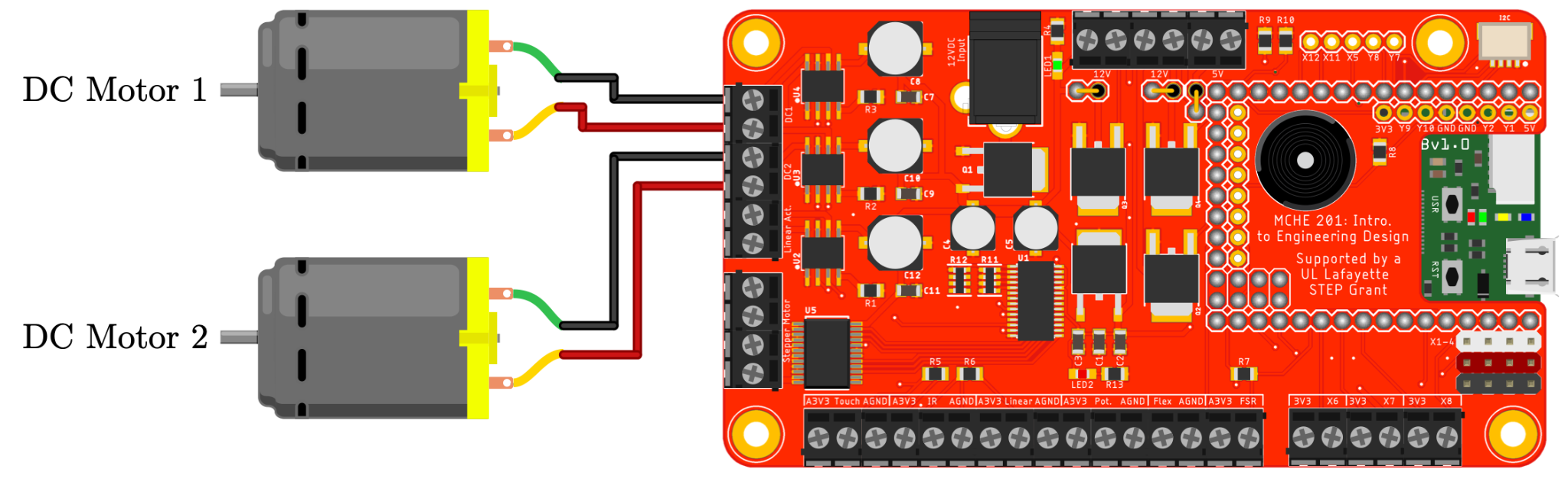
Wiring Diagrams
Lessons Learned
- Sensor placement & shielding matter as much as code; physical mitigation crushed false positives.
- Isolating logic power avoided brownouts during solenoid inrush.
- PID tuning reduced overshoot by ~70%, improving alignment and hook reliability.
- Module boundaries (sensing, actuation, state) made on-site debugging fast.